 SatNOGS Rotator
SatNOGS Rotator

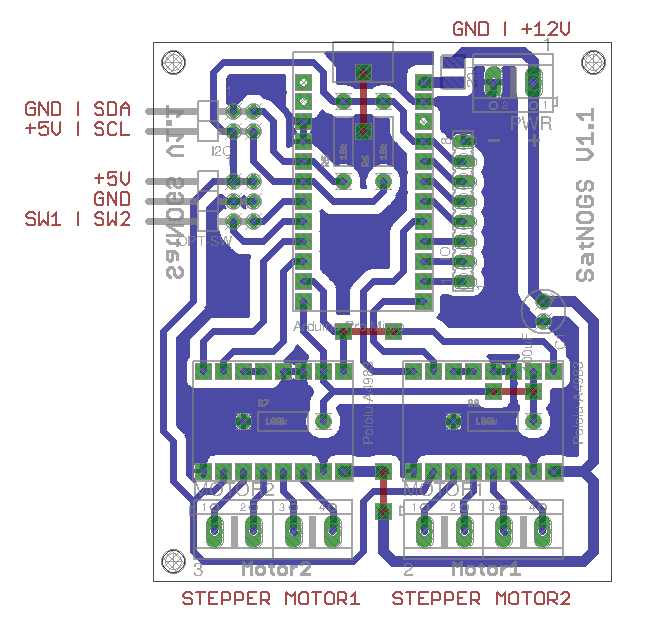
Our tracking mechanism is designed from scratch, parametric by default, 3D printed in under 8 hours. Utilizing two NEMA14 stepper motors or DC motors we have unconstrained movement in Altitude and Azimuth.
Version 2
Version 3.0.1
Designs – Wiki – Instructions
In development (3.1)
Antennas

Lightweight antennas designed to meet satellite communication specifications. SatNOGS includes designs and how-tos for 70cm and 2m band Yagi and Helical antennas. Parabolic antenna design is in the works too.
Designs – Wiki – Instructions
Client Computer
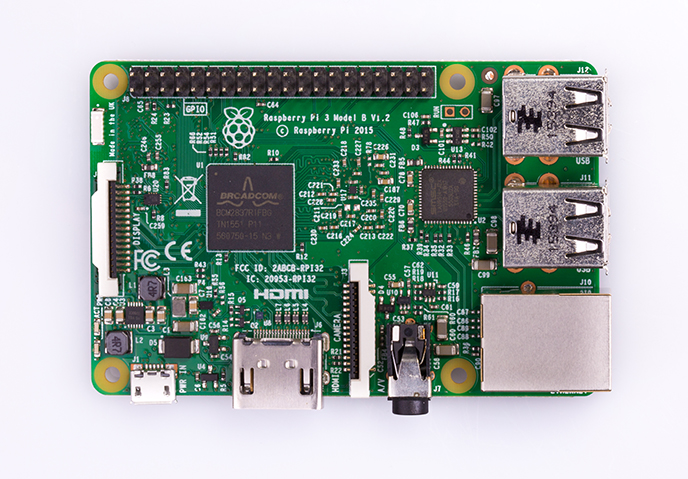
Our primary configuration includes the RaspberryPi 3 as a single-board computer. Running a custom built Raspbian, exposes all ground station functionality (status, tracking, signal receiving and processing) over LAN or WiFi for mobility or remote operation.
Client installation for Raspberry Pi 3
You can also choose to install the client in another Debian based OS on any x86 or ARM based computer:
Radio Receiver

Based on the versatile RTL2832U chip , SatNOGS is using R820T RTL-SDR as the default signal receiver and tuner. The R820T RTL-SDR is currently the cheapest, most common, and most performing solution available in terms of general sensitivity having a frequency range of 24 – 1766 MHz. We also do support Ettus USRPs (through UHD), Airspy, and Funcube Dongle as alternatives for SDR. The stack allows usage of other receivers too (like amateur radio transceivers) through the usage of rigctld (part of Ham Lib project), although an SDR setup is strongly suggested.